The SR04 robot was designed and built by David P. Anderson. From David's description:
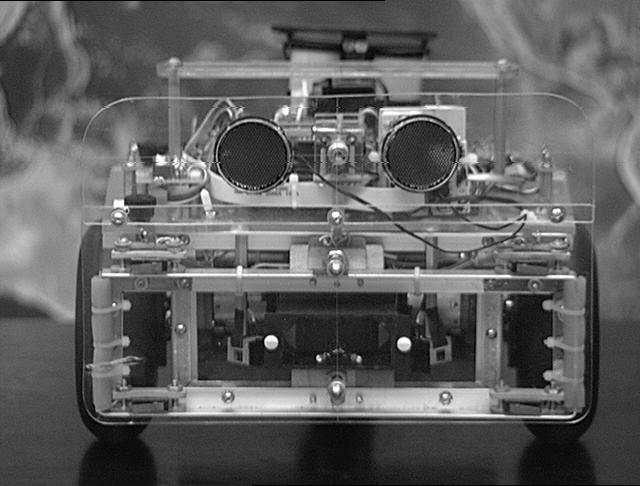
SR04 is a small mobile robot suitable for exploring human habitats unattended.
It is controlled by a Motorola HC6811 microprocessor running in an M.I.T. 6.270 CPU card, similar to the commercially available "Handy Board." Two 12-volt DC gear-head motors maneuver the robot in a dual-differential drive configuration, balanced by a non-driven tail wheel caster and powered by a 12 volt 2.2 amp-hour sealed lead acid battery. Sensory input is provided by (in order of priority): front bumper switches, IR collision avoidance, stereo sonar ranging, photo detectors, passive IR motion detection, and shaft-encoder odometry.
 |
Links#
- SR04 Mobile Robot
 , project description by David P. Anderson (PDF version)
, project description by David P. Anderson (PDF version)
- SR04 Mobile Robot from the Newsletter of the Seattle Robotics Society
- Subsumption for hte SR04 and JBot Robots
David P. Anderson, 26 March 2007