What follows are preliminary notes during the build of the KRZ02, a Mechanum-wheeled robot. It uses parts from the
KRZ01 robot and therefore supercedes (replaces) it. Its Raspberry Pi Zero W, Mini Black Hat Hack3r, and Picon Zero motor controller are used on the KRZ02. After contacting 4Tronix, they sent a customised Picon Zero that uses a different I2C address
so that it's possible to use two on this robot without bus contention. A simpler alternative would have been to use the
PiBorg ZeroBorg Motor Controller , which has four motor controllers as
well as a 1.5A regulated power supply.
, which has four motor controllers as
well as a 1.5A regulated power supply.
Alternately, if I wanted to move over to a Raspberry Pi Pico, there's the Kitronik Robotics Board for Raspberry Pi Pico, which has four motor controllers, and can also control eight servos.
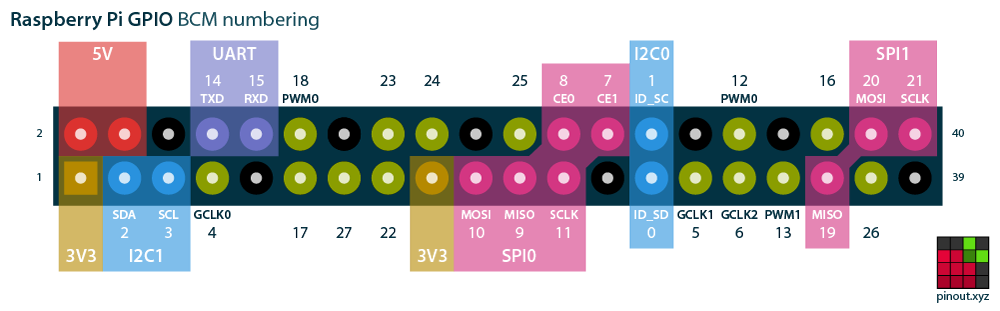
GPIO Planning Guide#
The KRZ02 has four motors, four motor encoders, each with four wires. So it brings 24 wires from the lower board up onto the upper. While not especially complicated this represents the biggest wiring challenge of the robot, so it is planned out below.
 |