It was David's fourth robot, hence the "04", a bit curious what the "SR" stands for (small robot?). The SR04 robot was designed and built by David P. Anderson.
From David's description:
Design#
Chassis#
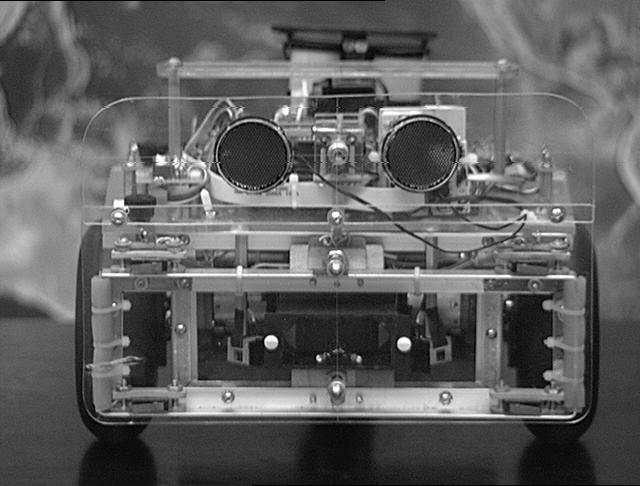 |
The design which has emerged is a small dual-differential drive platform with the geometry of an 11" circle. The drive wheels and tail caster sit on the perimeter of this circle, and thus it can rotate in its own space. This greatly simplifies software for maneuvering and collision avoidance.
CPUThe robot controller is a Motorola HC6811 microprocessor running in an M.I.T. 6.270 board. This card was developed for the introductory robotics course taught at M.I.T. It provides the HC6811 processor with 32k of battery-backed RAM, 32 eight-bit A/D channels, hardware 40khz IR , 6 one-amp H-Bridge (L293) motor driver channels, an LCD readout, and some digital I/O ports for timer and output compare functions useful to robot builder-types.
Links#
- SR04 Mobile Robot
 , project description by David P. Anderson (PDF version)
, project description by David P. Anderson (PDF version)
- SR04 Mobile Robot from the Newsletter of the Seattle Robotics Society
- Subsumption for hte SR04 and JBot Robots
David P. Anderson, 26 March 2007