The SR04 robot was designed and built by David P. Anderson. From David's description:
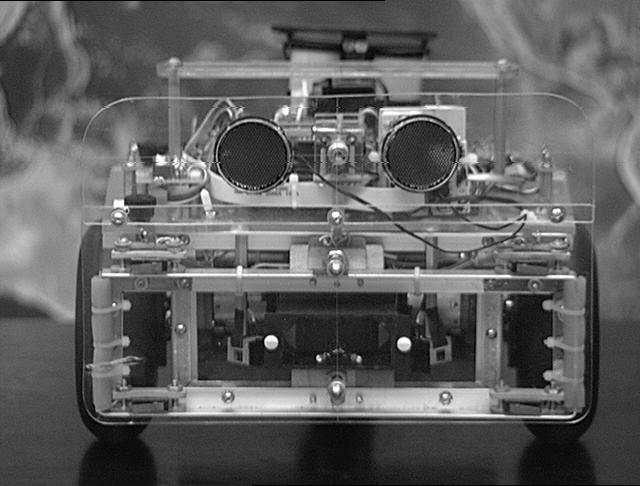 |
Sensory input is provided by (in order of priority): front bumper switches, IR collision avoidance, stereo sonar ranging, photo detectors, passive IR motion detection, and shaft-encoder odometry.
It was David's fourth robot, hence the "04", a bit curious what the "SR" stands for (small robot?).
Links#
- SR04 Mobile Robot
 , project description by David P. Anderson (PDF version)
, project description by David P. Anderson (PDF version)
- SR04 Mobile Robot from the Newsletter of the Seattle Robotics Society
- Subsumption for hte SR04 and JBot Robots
David P. Anderson, 26 March 2007
Copyright 2020 NZPRG. All Rights Reserved. Distributed under a Creative Commons Attribution 4.0 International license