 |
I've been collecting ideas for building a Mars Rover. This can easily cost a few thousand dollars so I'm not quite sure I'm willing to fund such a venture, but it's fun to dream (and plan).
Apparently lots of people have been inspired by the NASA Mars rovers, as there's lots of projects out on the Web. NASA has even created an "open source" robot project, with downloadable plans.
Design Notes#
So far I've been scanning the cool robot parts at ServoCity for ideas for the steering mechanism and rocker arms. The scale and weight of the overall robot help decide the size/power of the motors and servos. It's a bit of a balancing act. I also want to, unlike most of the "civilian" designs, somehow tuck my motors inside the wheels or otherwise not have them hanging down near the ground as many/most of the rovers I've seen seem to do.
for ideas for the steering mechanism and rocker arms. The scale and weight of the overall robot help decide the size/power of the motors and servos. It's a bit of a balancing act. I also want to, unlike most of the "civilian" designs, somehow tuck my motors inside the wheels or otherwise not have them hanging down near the ground as many/most of the rovers I've seen seem to do.
There's a huge impact on ground clearance if your motors are down there banging into rocks and such. The difficulty seems to be locating some suitably deep wheels. I can't imagine simply 3D printing them, as plastic wheels wouldn't last very long on rocks or concrete. I want a robot that can actually roam outdoors. Also, unless the motors have durable ball bearings protecting the shafts, there needs to be some significant insulation between the motor shaft and the shocks that the wheels will create as they go over rough surfaces. Unless the robot is only going to run indoors, and then what's the point?!
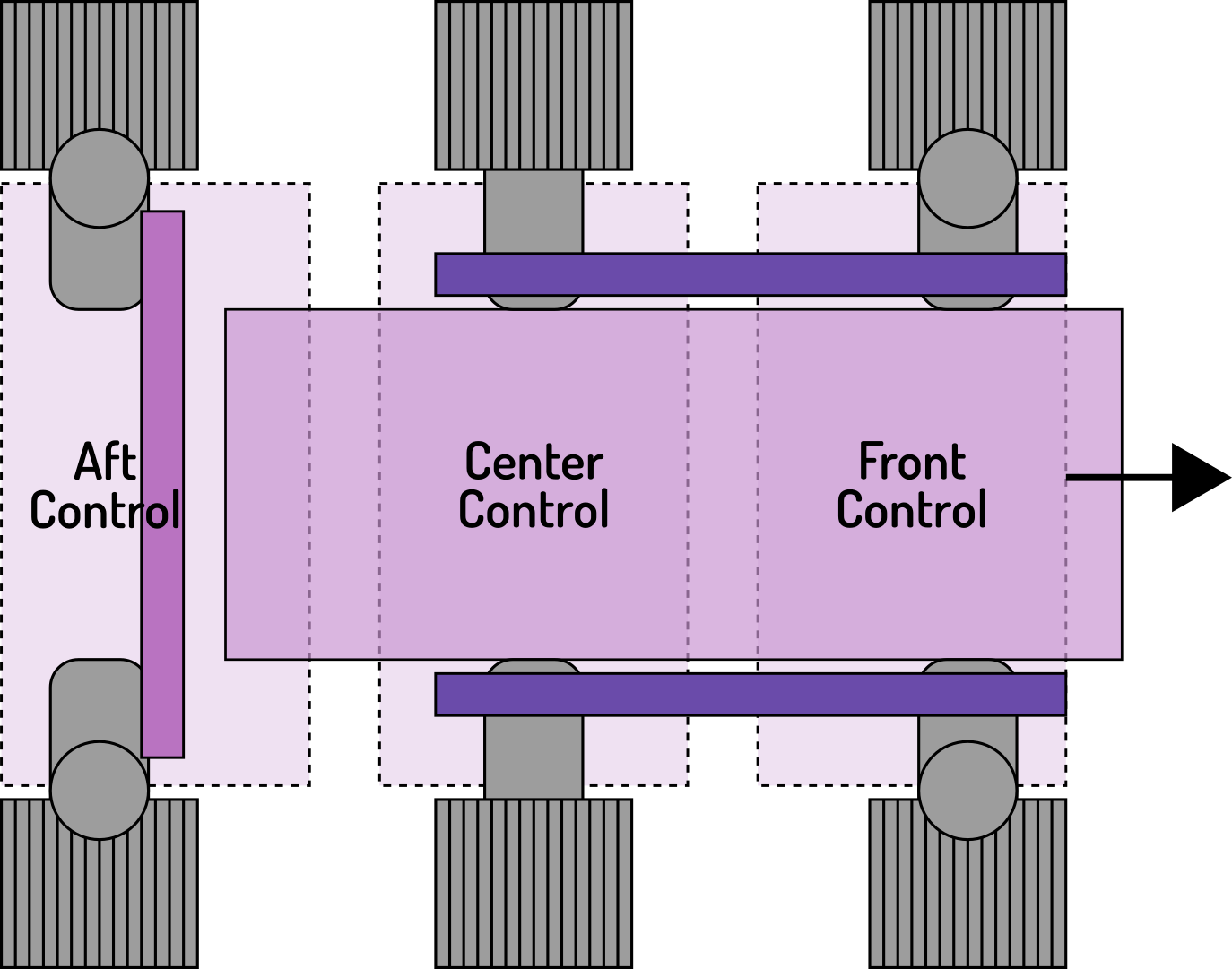 |
The basic idea is this: six wheels, all 180-200rpm ~25mm high power motors with shaft encoders. The two center wheels are driven but not steerable. The four corner wheels are mounted on ServoBlocks so they can be steered. Rather than a Rocker-Bogie, we opt for the simpler Triple-Rocker. This requires two identical rockers on the sides and one almost-the-same rocker arm at the back, each with dual ball bearing mounts. There are no differentials or connections between the rockers (as in the Rocker-Bogie design).
There will be three pairs of motors, three dual motor controllers, and three batteries. Basically three entirely isolated electical systems, with two I²C isolators between so that there is a common I²C communications between the three, with the center control system the master. The front and back motor/controller pairs (with the steering) are effectively identical. The central system won't have the steering, so that's where we'll mount the controller (likely a Raspberry Pi) and the rest of the sensors.
Rocker-Bogie vs. Triple-Rocker Design#
The ExoMars (and ExoMy) robot uses a simpler "Triple-Rocker" design.
Someone-Else's Specifications#
I'm going to (initially) steal the specs from the JPL Open Source Rover Project, as a point of reference. Their robot is a bit larger than I'm planning and has an estimated cost of around US$2500, and that's certainly at the upper limit of my budget. But it's a start.
| Attribute | Value [imperial] | Value [SI] |
|---|---|---|
| Weight | 28 [lbs] | 12.7 [kg] |
| Footprint | 24x14 [in] | 60.96x30.48 [cm] |
| Battery Capacity | 5200 [mAh] | 5200 [mAh] |
| Battery Discharge Rate | 8 [A] | 8 [A] |
| Nominal Current Draw | 1.2 [A] | 1.2 [A] |
| Operating time | 5 [hrs] (continual use) | 5 [hrs] (continual use) |
| Approximate Max speed | 68.8 [in/s] | 1.75 [m/s] |
| Maximum 90 deg vertical scale | 12 [in] | 30.48 [cm] |
| Maximum height differential between sides | 14 [in] | 35.56 [cm] |
| Communication (in this guide) | Bluetooth app (Android only) and Xbox Controller | |
| Cost (*) | $2,500 |
Initial Specifications#
| Qty | Item | Unit Price (NZ) | Price (NZ) | Vendor | Reference | |
| 3 | ThunderBorg motor controller | $73.00 | $219.00 | PiBorg | https://www.piborg.org/motor-control-1135/thunderborg | |
| 6 | wheels | $30.00 | $180.00 | misc | ||
| 6 | 47:1 Metal Gearmotor 25Dx67L mm HP 12V with 48 CPR Encoder | $53.00 | $318.00 | Pololu | https://www.pololu.com/product/4845 | |
| 4 | steering assembly: ServoBlock, servo mounts (est.) | $42.72 | $170.88 | ServoCity | https://www.servocity.com/standard-hub-shaft-servoblock-25t-spline/ | |
| 4 | 2000 Series Dual Mode Servo (25-2) | $47.00 | $188.00 | ServoCity | https://www.servocity.com/2000-series-dual-mode-servo-25-2/ | |
| 3 | rocker assembly (est.) | $50.00 | $150.00 | ServoCity/misc | ||
| 1 | Adafruit 16-Channel PWM / Servo Bonnet for Raspberry Pi | $14.19 | $14.19 | Adafruit | https://www.adafruit.com/product/3416 | |
| 3 | Makita Battery Li-Ion CXT 12v 4.0Ah | $136.56 | $409.68 | Toolshed Petone | https://www.thetoolshed.co.nz/product/8478-makita-battery-li-ion-cxt-12v-4-0ah | |
| 2 | 12V max CXT® Power Source w/ USB port (YL000000003) | $95.00 | $190.00 | Toolshed Petone | https://www.makitatools.com/products/details/YL00000003 | |
| 1 | Raspberry Pi 3 - Model B - ARMv8 with 1G RAM | $35.00 | $35.00 | Adafruit | https://www.adafruit.com/product/3055 | |
| 5 | Pololu Carrier with Sharp GP2Y0A60SZLF Analog Distance Sensor 10-150cm – 3V | $18.47 | $92.35 | Pololu | https://www.pololu.com/product/2474 | |
| 2 | Adafruit ISO1540 Bidirectional I2C Isolator - STEMMA QT / Qwiic | $12.76 | $25.52 | Adafruit | https://www.adafruit.com/product/4903 | |
| 1 | chassis (est.) | $50.00 | $50.00 | misc | ||
| Total (not including shipping) | $2,042.62 |
Links#
- JPL Open Source Rover Project on github
- NASA Open Source Rover
- Raspberry Pi Zero or Microbit M.A.R.S. Rover robot £120, a brief review of 4Tronix M.A.R.S. Rover Robot for Microbit or Pi Zero (there are variants for the Raspberry Pi Zero or Micro:Bit)
- Yuri 3 rover (The MagPi #82), describes the Yuri 3 mini Mars rover, which was designed by Airbus engineer John Chinner
- Build your own NASA Curiosity rover from the Raspberry Pi Blog
- Students Can Now Build Their Own Rover Model (JPL)
- NASA, Raspberry Pi and a mini rover, built by NASA scientist Dr. Jamie Molaro with an estimated cost of US$5333
- Robot Garden’s Mars Rover. a 3D-printed robot (YouTube video also available)