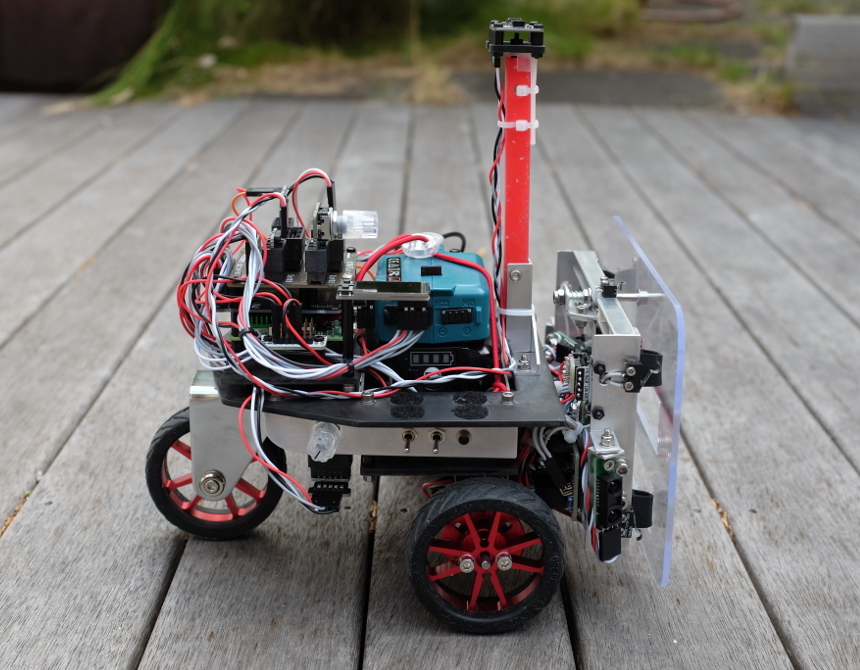
This is the preliminary documentation for the KD01 robot, a 2 wheel (plus caster) differential drive robot. It shares the same software, chassis components, basic drive train, motor encoders and controllers as the KR01.
Description#
 |
There's not much online yet about the robot but there is a blog entry and three YouTube videos:
- Differential Drive
 (NZPRG blog entry)
(NZPRG blog entry)
- KD01 Moth Behaviour
- KD01 Rotate in Place Test
- KD01 Rotate in Place (first try)
I2C Bus#
Things change all the time, but here's a sample of what's on the robot:
% i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- 15 -- -- 18 -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- 38 -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- 48 -- 4a -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- 74 -- -- 77
- 0x15 : ThunderBorg motor controller
- 0x18 : RGB Encoder breakout
- 0x38 : HT0740 Switch (wired to cooling fan)
- 0x48 : ADS1015 AD converter
- 0x4A : BNO085 IMU
- 0x74 : starboard RGBMatrix5x5
- 0x77 : port RGBMatrix5x5
GPIO Pin Usage#
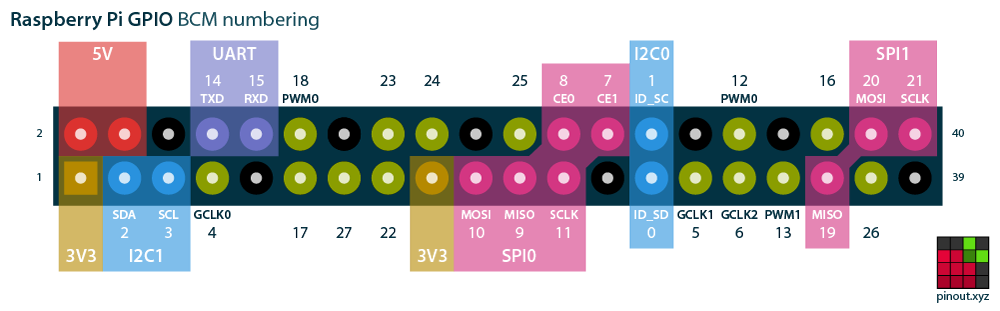 |
| PIN | PIN |
|---|---|
| 3V3 | +5V |
| 02: SDA (I2C) | +5V |
| 03: SCL (I2C) | GND |
| 04 | 14: TXD0 |
| GND | 15: RXD0 |
| 17: ENCODER A2 STBD (white) | 18: ENCODER B2 STBD (PCM_CLK) (violet) |
| 27: GPIO 27 (unused) | GND |
| 22: ENCODER A1 PORT (grey) | 23: ENCODER B1 PORT (blue) † |
| 3V3 † | 24: GPIO 24† Button B on 1.14" Mini Pi TFT Display |
| 10: MOSI† | GND † |
| 9: MISO† | 25: GPIO 25† |
| 11: SCLK† | 8: CE0† |
| GND | 7: CE1 |
| ID_SD | ID_SC |
| 5: ext clock (grey, from Itsy Bitsy) | GND |
| 6: rosd toggle switch (orange) | 12: Button A on 1.14" Mini Pi TFT Display (blue) |
| 13: | GND |
| 19: | 16: |
| 26: (unused: conflict with SPI) | 20: |
| GND | 21: |
† part of cable assembly connecting to Adafruit 2.0" 320x240 Color IPS TFT Display
‡ part of cable assembly connecting to Adafruit 1.14" Mini Pi TFT Display
For sensor wires, wire markings are orange or red for port, green for starboard (just like on a boat).
‡ part of cable assembly connecting to Adafruit 1.14" Mini Pi TFT Display
Copyright 2020 NZPRG. All Rights Reserved. Distributed under a Creative Commons Attribution 4.0 International license