This is a page about robot steering. There are both steering mechanisms and steering modes.
Steering Mechanism#
 |
A Steering Mechanism is the mechanical means by which steering is accomplished.
Many robots and other vehicles have a steering mode that is the same as (i.e., is limited to) its steering mechanism. A normal automobile steers using what's called Ackermann steering. That's both its mechanism as well as its mode, since that's the only way a car can steer. For a four or six wheel robot with independent steering on each wheel, it's possible to mimic Ackermann steering, but also other styles, even "retrograde" styles such as Skid steering, e.g., to ignore the steering servos, lock each wheel at perpendicular/90° to the robot's centerline, and just use the different in port and starboard wheel velocity to change direction.
- Ackermann steering: The angle of the rear wheels are fixed in place, with the front wheels able to pivot on a steering axis.
- Differential Steering: where all wheels' angles are fixed, with the difference in port-starboard wheel velocity determining the steering angle (which we'll call theta, more on that below…). Because there's only two wheels there's no skidding. A 2 wheel differential drive robot (with a caster, or self-balancing) has just this one mechanism and mode of steering.
- Skid Steering: this is like Differential Steering but because as the robot turns each of its wheels is going a different velocity in relation to the robot's velocity, it causes wheel scrub, skidding or sliding like a tank. If your robot has 4-6 wheels but only two motor controllers, i.e., all motors on each side operate at the same speed, this is its mechanism and mode.
There's also Mecanum and Omni wheels, which provide alternative mechanisms for movement/steering.
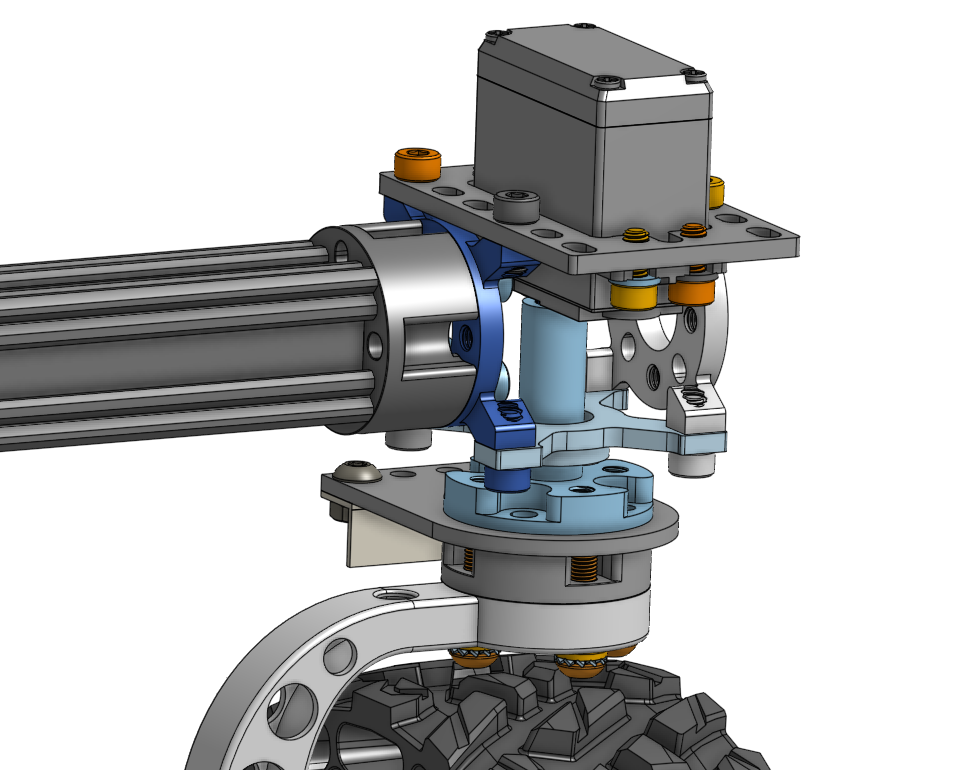
For a Mars rover style robot, each wheel armature is mounted on an independent steering mechanism, using a servo.
Steering Modes#
A Steering Mode is the manner in which steering is done.
Lets enumerate some of the steering modes for a 4-6 wheel Mars rover style robot:
- Ackermann: rear locked at 90° to center line of robot, front synchronised steering only
- AFRS: front synchronised, rear synchronised steering
- Omnidirectional: all steering axles pointing along the same axis
- Sideways: (AKA Crab or Strafing) all steering axles parallel (0°) with center line of robot. Sideways is a specialisation of Omnidirectional.
- Skid: (AKA Tank) all steering at 90° to center line
- Rotate: (AKA Spin or Center Pivot) all motors' axles point at the center of the robot (this would be 45°/-45° only if the robot is either square or circular). A 6 wheeler would have middle steering set at 90°
- Forward Pivot: front wheels at angles matching radius of turn, rear at 90°
- Aft Pivot: front wheels at 90°, rear at angles matching radius of turn
"Sideways" is obviously descriptive but doesn't sound quite right... but it's at least obvious what it means.
Steering via Velocity and Theta#
When programming movement of a robot it's possible to set each motor's velocity to Skid-steer the robot. When you add the availability of steering servos, things get more complicated. And this points out a better way of approaching the design of a robot's navigation, using two variables: velocity and theta (turning angle).
