Dave Ackley of the DPRG has developed a way of testing a robot on a bench that simulates its inertia, that is, driving the robot whilst simulating the robot's weight (mass). His message is included below, including the photos he included and lightly edited for formatting sake:
From: David Ackley [mailto:dackley@verizon.net] Sent: Tuesday, June 22, 2021 9:05 PM To: 'DPRGlist' <dprglist-bounces@lists.dprg.org> Subject: My Robot Chassis Dynamometer
 |
Hi All
My “Robot Chassis Dynamometer” is what I tried to show at the 9/24/2020 VRBNO meeting, but I’m not sure whether it ever showed up when I was discussing it or that people followed my description.
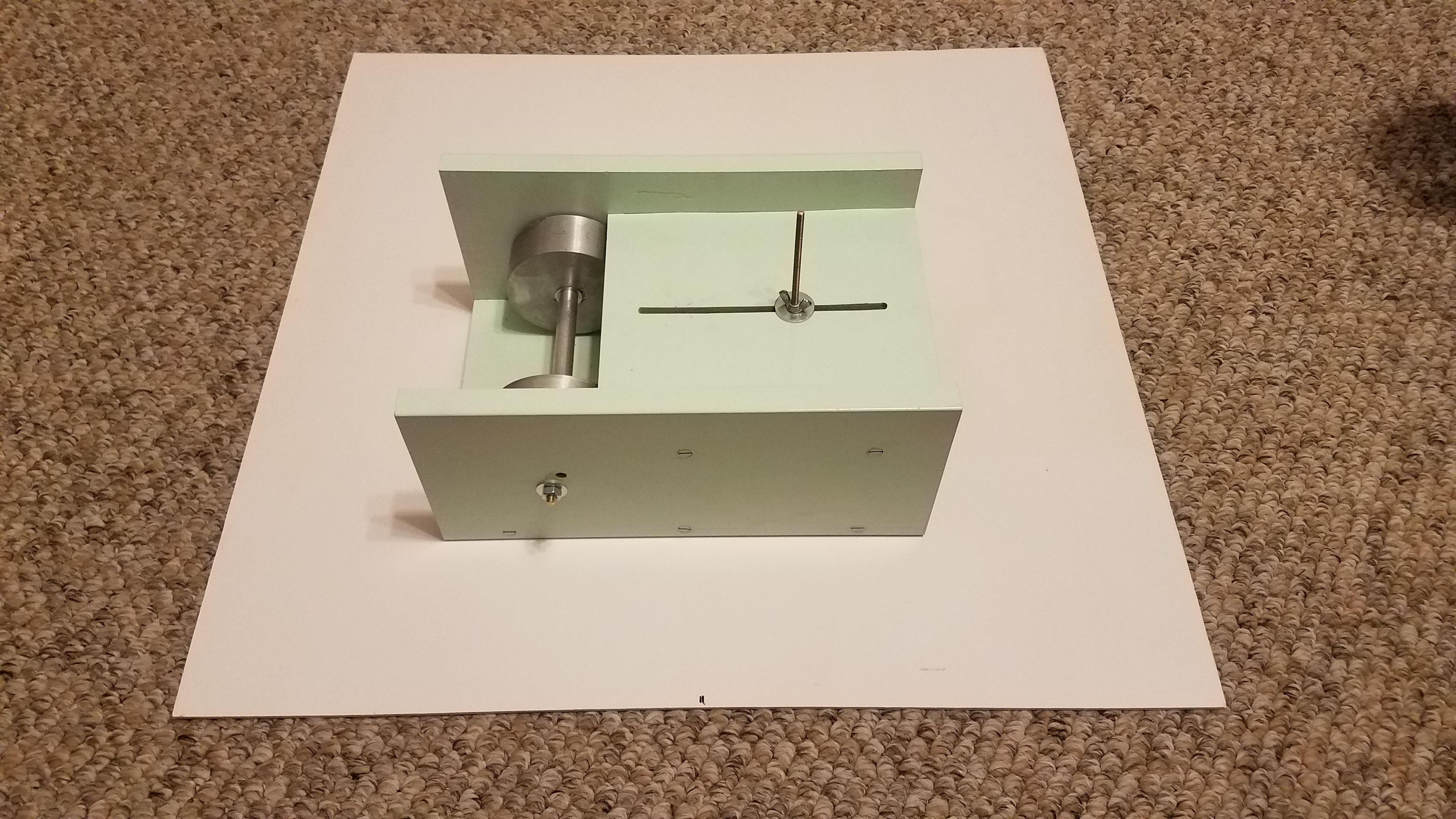
Just in case it didn’t show up I’ve attached a picture of the bare “Robot Chassis Dynamometer” and a picture of my “Build-More-Robots” robot sitting on it that I’m going to try tuning the PID on.
I really like the size, cost, and characteristics of the “Build-More-Robots” robot, so I have several different versions of it.
I decided that what I really wanted was a way of running this robot in place while analyzing and tuning up its PID.
So I came up with the idea of building a “Robot Chassis Dynamometer” where load/inertia on the robot’s wheels is a reasonable approximation to what the robot would see if it was actually running around “In-The-Wild”.
In theory, the inertia that a robot’s wheels see is roughly the robot’s mass (Mr) times its wheel radius (Rr) squared, i.e.,
Mr * Rr **2
So I built a “Robot Chassis Dynamometer” with two flywheels that the robot’s two wheels drive that try to approximate the effect of the robot’s inertia.
 |
The inertia of a solid flywheel is one half its mass (Mrcd) times its radius (Rrcd) squared, i.e.,
( Mrcd / 2 ) * Rrcd **2So I got a chunk of metal with a suitable mass and radius such that its inertia approximates my robot’s mass and wheel radius to build the “Robot Chassis Dynamometer” shown in the attached pictures.
Enjoy
Dave
_______________________________________________ DPRGlist mailing list DPRGlist@lists.dprg.org http://lists.dprg.org/listinfo.cgi/dprglist-dprg.org
